Staer v1
Spatial Intelligence Infrastructure for Mobile Robot Fleets
Production-grade infrastructure for autonomous mobile robots. Build semantic self-updating 3D maps, coordinate multi-vendor fleets, extract insights from robot sensors.
Four pillars. One solution. Zero vendor lock-in.
Mobile robots solve physical tasks through continuous mapping, reasoning, planning, and learning.
Semantic 3D maps from existing sensors.
Contextual understanding of environments and objects.
Coordinated task execution across mixed fleets.
Continuous improvement from operational data.
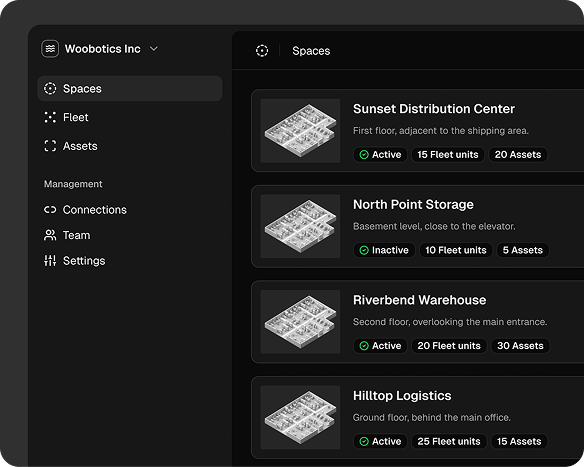
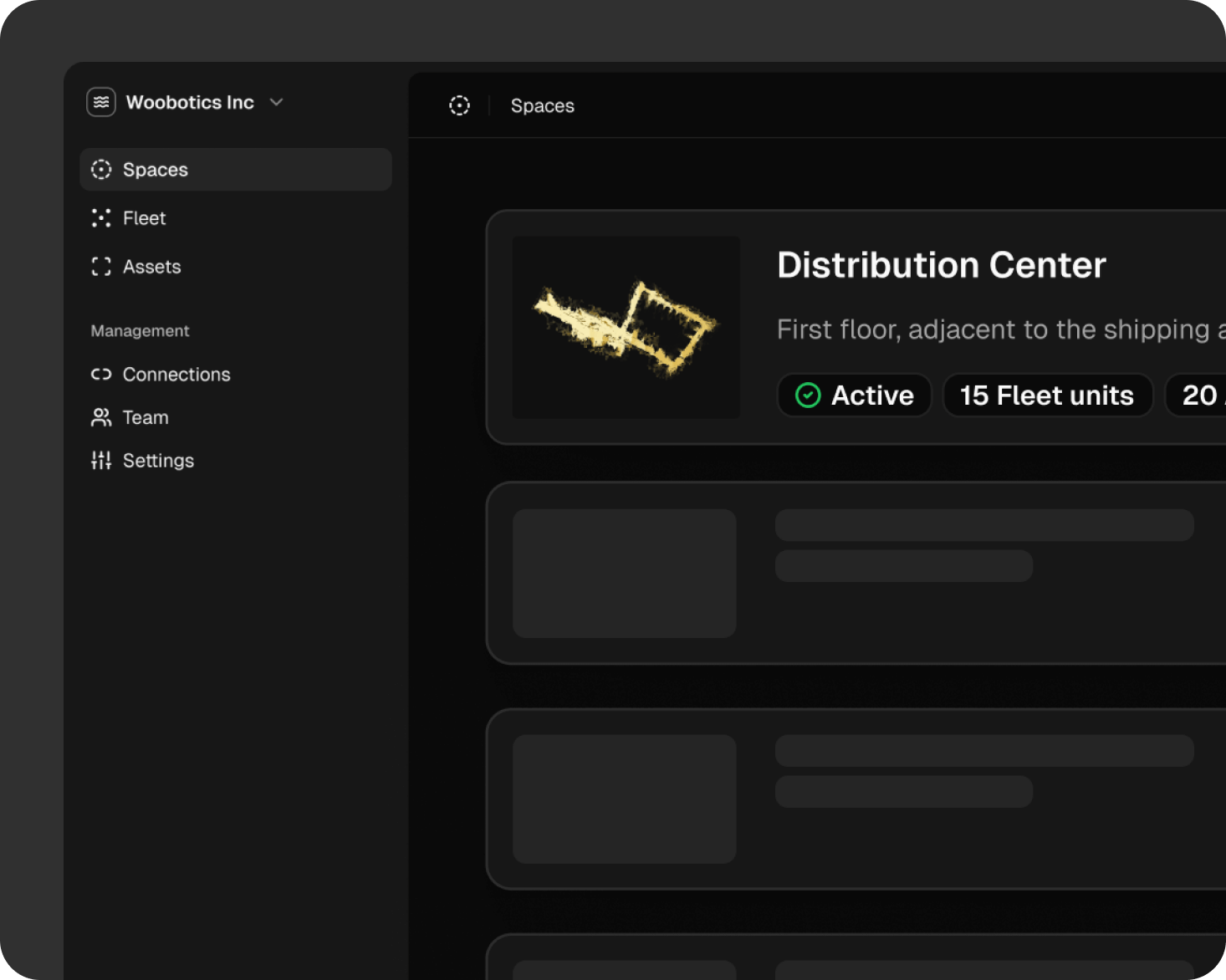
Spaces
Semantic 3D Mapping from Live Sensor Data
Turn raw sensor streams into continuously updated spatial intelligence that every robot in your fleet can reference.
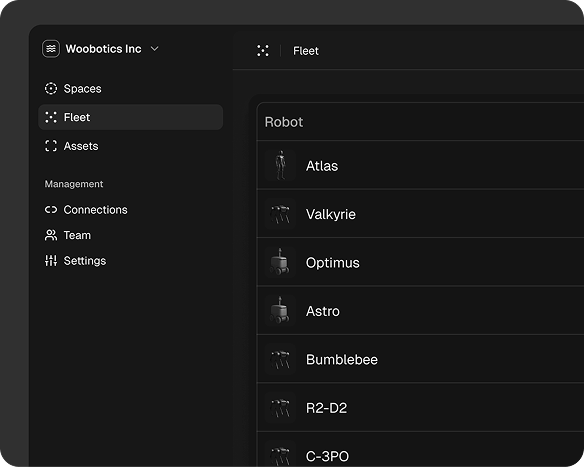
Fleet
Multi-Vendor Fleet Coordination from one Place
Deploy, monitor, and orchestrate diverse robot types without integration complexity. Hardware-agnostic by design.
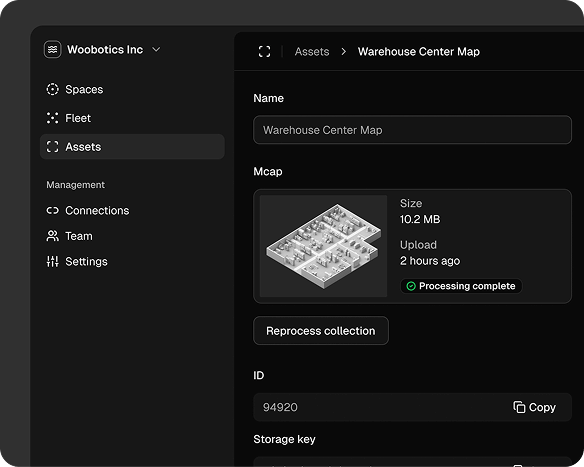
Assets
Data Processing Pipelines in the Cloud
Ingest, process, and extract insights from every robot sensor. Continuous learning improves perception over time.
Join US and Build the future of robotics
Fully remote. Async-first. Low-meeting by design.
The team operates distributed across time zones. All positions are location-agnostic. Execution matters more than presence. Set ambitious goals, manage time independently, communicate openly. This setup works for people who focus on building, not coordination overhead.
Career openings